








Lokalt
Vellykkede autonome subsea-inspeksjoner for DeepOcean
Undervannsentreprenøren DeepOcean og Aker BP har gjennomført vellykkede forsøk med en autonom inspeksjonsdrone (AID – Autonomous Inspection Drone) på det Aker BP-opererte Alvheim-feltet i Nordsjøen.
Offshore: – Selv om å teste ny autonom teknologi er spennende i seg selv, var hovedmålet vårt å finne ut om undervannsinspeksjoner kan gjennomføres mer kostnadseffektivt og med bedre og mer presis datakvalitet med denne nye teknologien og tilknyttede metoder. Konklusjonen er definitivt «ja». Utviklingen av AID-en er et forsknings- og utviklingsprosjekt som sannsynligvis kommer til å levere betydelig verdi til Aker BP de kommende årene, sier Jarle Marius Solland, operations manager i Aker BP.
AID-prosjektet er et strategisk partnerskap mellom DeepOcean, Argus Remote Systems og Vaars, hvor systemet er blitt utviklet med veiledning, støtte og finansiering fra Aker BP for å få teknologien til markedet. Den autonome inspeksjonsdronen har potensial til å endre måten undervannsinspeksjoner gjennomføres.
Ti-dagers inspeksjonskampanje
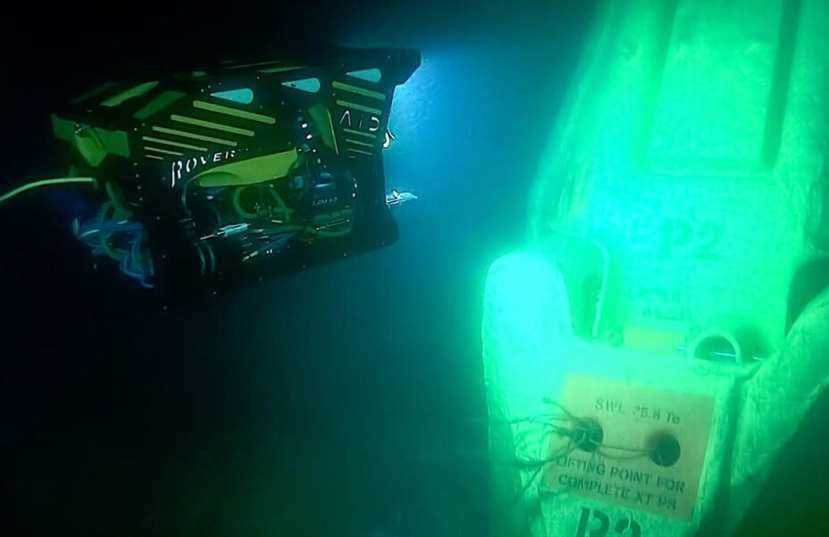
Som del av en ti dager lang kampanje, gjennomførte Aker BP og DeepOcean inspeksjon av brønnventiler (juletrær) og annen havbunnsinfrastruktur på subsea-feltet Alvheim på Norsk sokkel.
– De første inspeksjonsforsøkene var svært oppløftende. Basert på disse erfaringene tror vi at vi skal kunne inspisere subseainfrastrukturen på Alvheim merkbart raskere til neste år, sier Kristoffer Johansen, teknologileder hos DeepOcean.
De ulike oppdragene for undervannsinspeksjon ble planlagt av personell fra DeepOcean. Oppdragsplanene ble deretter overført fra et digitalt verktøy for oppdragsplanlegging til den autonome inspeksjonsdronen, AID-en. Inputen kom fra både onshore og offshore.
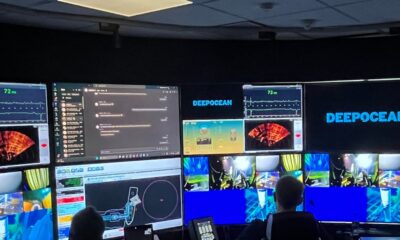
Dronen ble mobilisert fra det DeepOcean-opererte fartøyet «Edda Fauna», og erstattet den nåværende fjernstyrte undervannsfarkosten (ROV) om bord. Oppdragenene ble ledet og overvåket både lokalt fra «Edda Fauna» og fjernstyrt fra Remota sitt operasjonssenter (ROC) i Haugesund.
– Kombinasjonen av autonom undervannsinspeksjon og fjernstyrt oppdragskontroll er åpenbart en svært attraktiv løsning for operatørselskaper siden det betyr vesentlig lavere driftskostnader, utslipp og HMS-risiko. Systemets stabilitet var svært imponerende i løpet av oppdragene, sier Terje Nordeide, prosjektleder i DeepOcean.
Datafangst av høy kvalitet
Dronen er basert på en Rover MK2 ROV fra Argus Remote Systems, med oppgraderte utstyrs- og programvarepakker. Argus er ansvarlig for AID-plattformen og navigasjonsalgoritmen, mens DeepOcean er ansvarlig for digital tvilling, programvare for oppdragsplanlegging og live-overføring av dronen i drift. Vaarst er ansvarlig for maskinsynkameraet «Subslam 2x» for autonom navigasjon og datafangst.
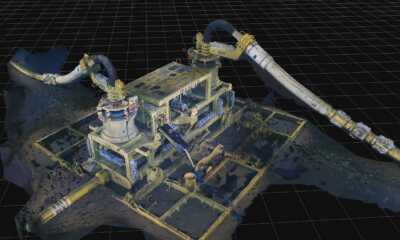
Inspeksjonsdata fra undervannsdronen overføres til land, og farkostens posisjon streames kontinuerlig tilbake til den digitale tvillingen for å sikre høy datakvalitet og øke situasjonsforståelsen.
– Under de første forsøkene opplevde vi mer stabil flyging med dronen, inkludert svært stabil navigasjon i løpet av inspeksjonene. Som resultat er datafangsten som brukes til etterbehandling av 3D-modeller av ekstraordinær høy kvalitet, legger Kristoffer Johansen til.
Den autonome inspeksjonsdronen måler 1,25 x 0,85 x 0,77 meter, veier 320 kilo i luft, og kan operere på havdyp ned til 3 000 meter. Den kan fly i DP-modus (dynamisk posisjonering) og har funksjoner både for å holde dronen på nøyaktig samme sted (station keeping) og for fjernstyring.